
Here you’ll find a small selection of my work:
As you can appreciate, several projects I have been involved in are protected and I cannot show them on a website like this.
Bike Rack Design
This freelance project’s brief was to design and prototype a visually pleasing, minimal / simple bike rack to display a high end road bike on the wall. This work involved sketching hundreds of options and virtually testing (in Solidworks).

Blender was used to provide some semi-realistic images to help visualise the product in someone’s home.
The options were whittled down to a simple visually pleasing natural spiral design with only two parts. The baseplate, made from folded steel is fixed to the wall and the spiral slides down over the top (hiding the bolts). Extensive back-and-forth with the manufacturer was required to satisfy any concerns.
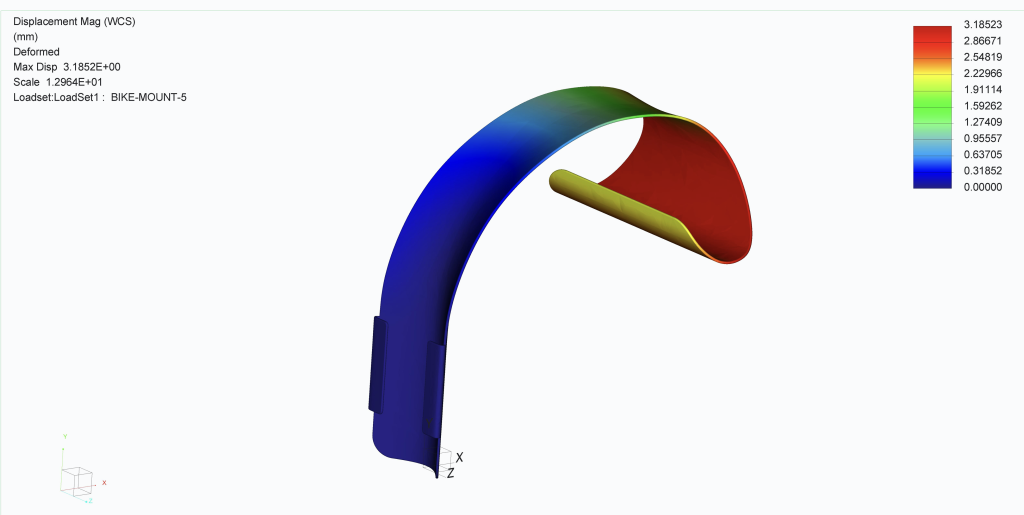
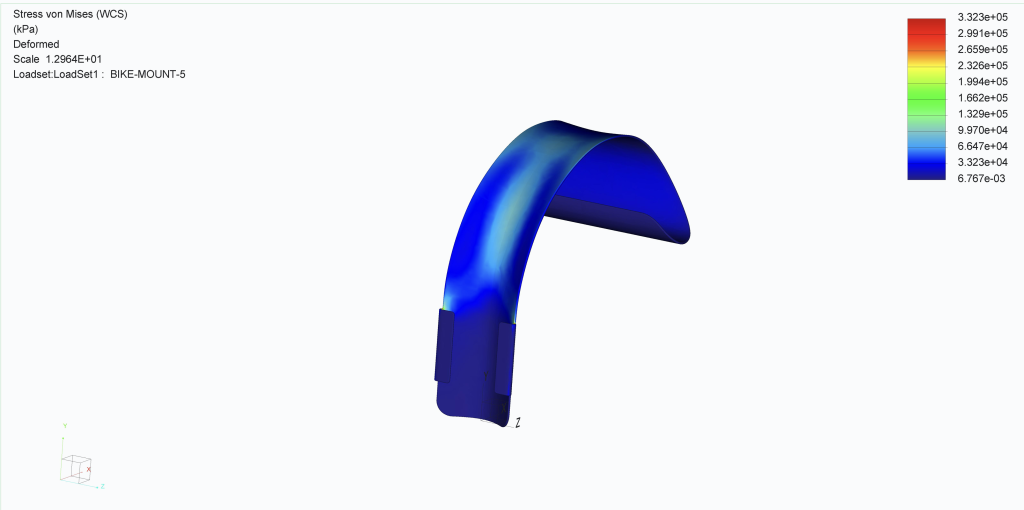
In this case displacement tests were performed to keep within a ‘window of give’. Stress tests were also performed and the result was a curved steel bike rack finished with black powder coating.

A prototype and bike looking great together. 🙂
Blueprint Lab
A 7-Function all-electric ‘Reach Bravo’ waterproof robot arm. I am responsible for the mechanical design from ‘back of envelope’ concept through to teaching production how to assemble the arm. Customers required an arm capable of human-like movement and strength capable of being submerged >300m below sea level.
https://blueprintlab.com/products/reach-bravo/

The modular design allows the arm to be used in any configuration from 6 degrees of freedom down to a simple single function grabber.
Patent: My design was granted a patent for the unique tub shape of the joints which want a reduced number of o-ring seals and therefore a more reliable product, less prone to leaks.
The mechanical design included the selection of everything from motors to harmonic drive gearing to achieve the 12kg of lift at full reach. The team of engineers from different disciplines worked very closely to jam the electronics (including a full Ubuntu computer and sensors) into tight spaces.

Wall Crawler
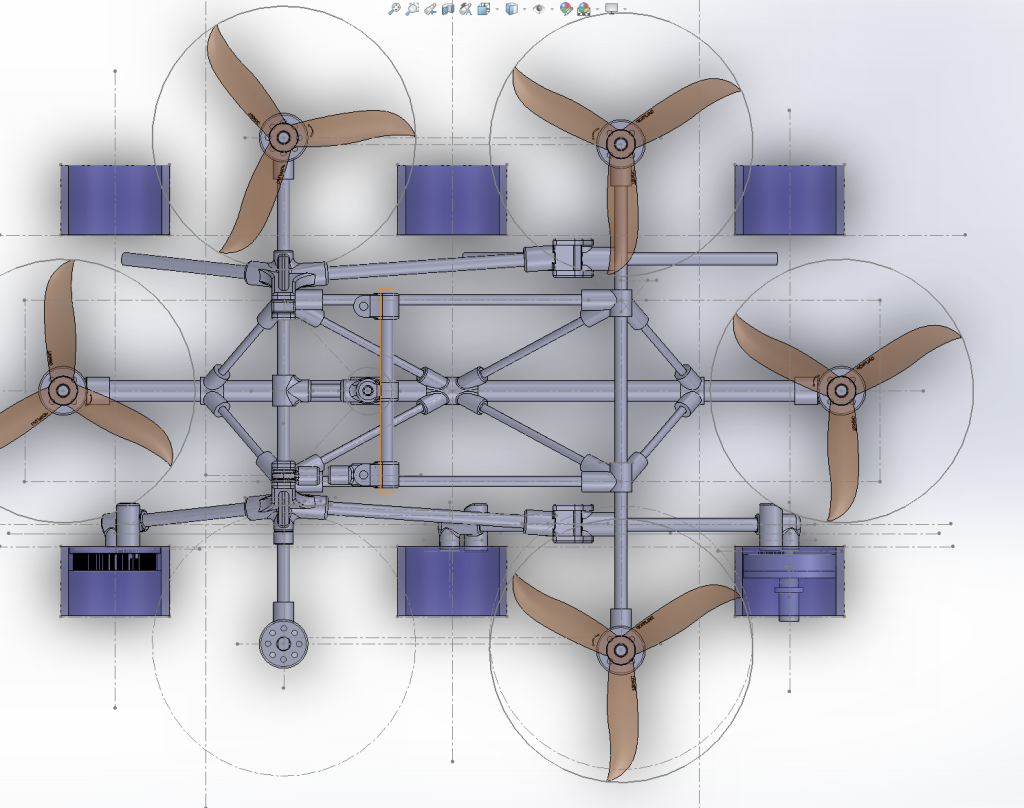
A personal project. A hobby of mine is creating self driving robots using ROS and hacked parts such as xbox Kinect. I set myself a challenge to create one that could drive vertically.
This turned out to be far harder than anticipated, as weight is such a major factor. The force created by the quad propellers needs to be higher than gravity * friction between the wheels and the wall surface.
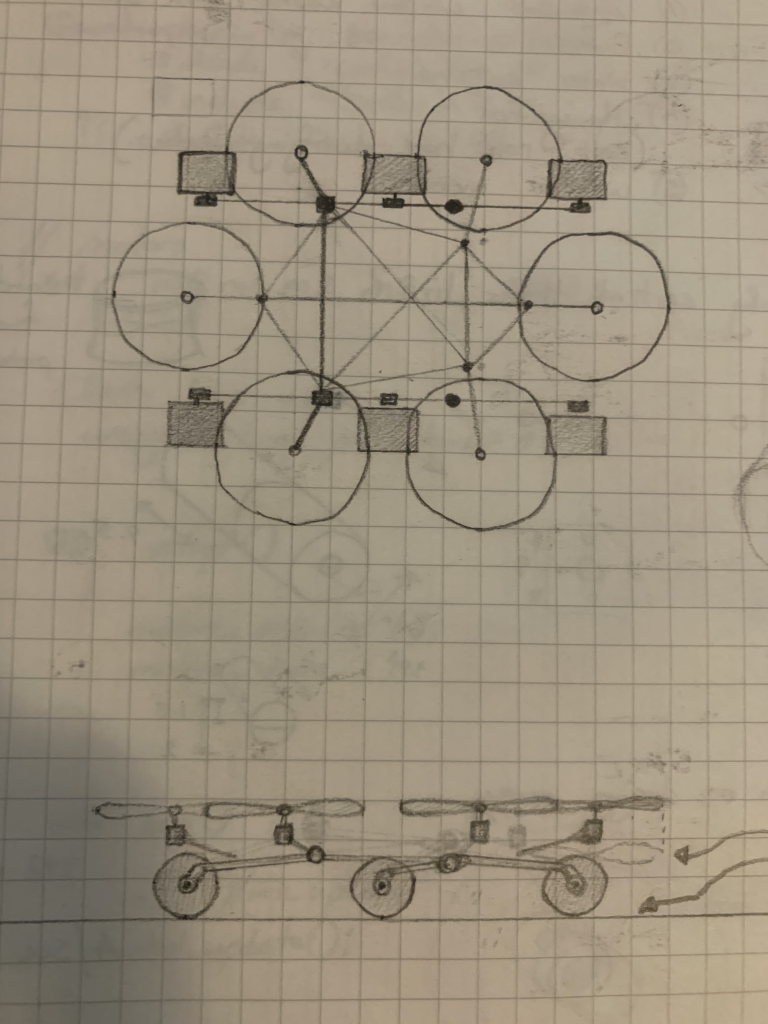
While it helped a little using foam wheels with more stick, the rover needed to be predominantly carbon fibre rods with very little 3d-printed nodes. I successfully created a prototype that supports itself on a wall and drive around vertically. All the ‘brains’ needed to be off the rover with communication via the umbilical cord, to reduce weight.

Working on challenging design problems is what excites me. With a strong appreciation of robotics and methods of manufacturing, I bring a unique point of view to a design solution.
Thanks for having a look at my work, I have more examples available if you would like to see more.